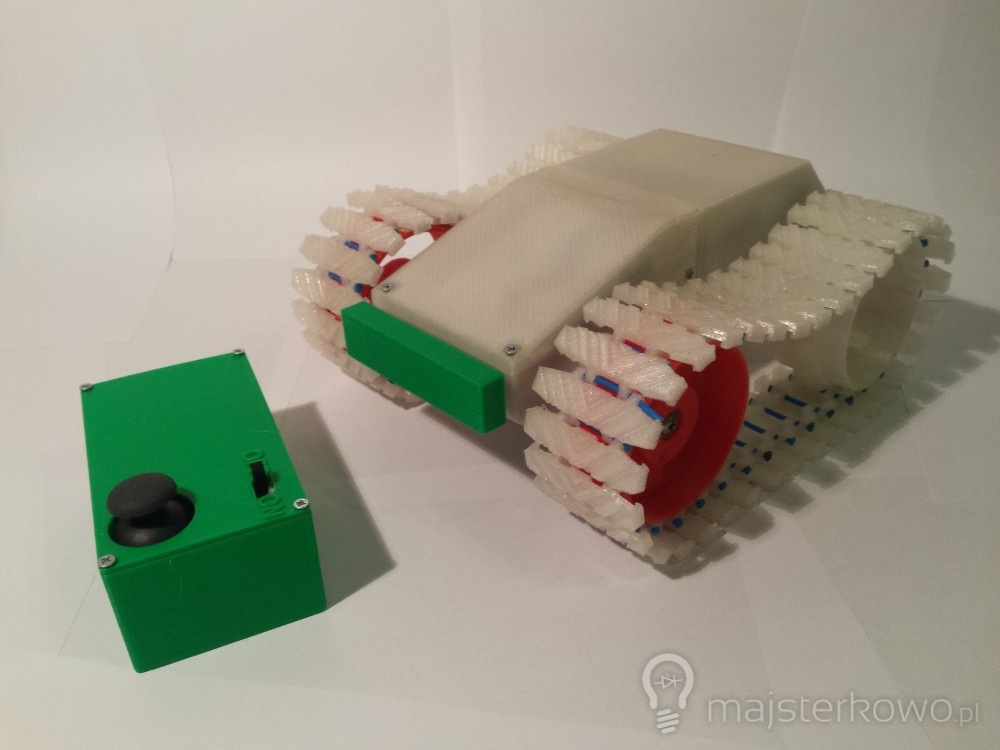
Od dłuższego czasu planowałem zbudować własny, szybki i zdalnie sterowany pojazd gąsienicowy. Budowę zacząłem w lutym, wykonałem projekt, zebrałem potrzebne części, zacząłem drukować elementy konstrukcji. Wreszcie mogę uznać że pojazd jest gotowy. ___________________________________________________________________________________________________ Użyte elementy:2 płytki Arduino UNO2 moduły nRF24L01L293D - dwukanałowy sterownik silnikówJoystick2 przełączniki 2 silniki z przekładnią koszyczek na 8 baterii AA8 baterii AAbateria 9 Vprzetwornica step-down LM2596wtyczka i gniazdko DCkoszulka termokurczliwa gniazdo szpilkowe (do podłączenia goldpinów)goldpiny niezarobione miękkie przewody przewody typu "męski - damski" i "damski - damski" taśma izolacyjnafilament do druku kilkanaście śrubek różnego rozmiaru płytka uniwersalna 3 x 7 cm4 łożyska typu "608"żyłka do kosiarki o średnicy 2 mm ___________________________________________________________________________________________________ Projekt pojazdu wykonałem w programie Autodesk Inventor, zabrało mi to trochę czasu. Kadłub pojazdu składa się z 2 części dolnych i 2 górnych, gdyż pole robocze mojej drukarki ma wynosi tylko 12 x 12 x 12 cm. Wszystkie piliki udostępniam w załączniku. Model ogniwa gąsienicy zaczerpnąłem ze strony: http://www.thingiverse.com/thing:35668 Wydrukowanie wszystkich części trwało kilkanaście godzin. Filament którego użyłem to Plastspaw-Wolfix PLA transparentny i w kilku innych kolorach. Bardzo dobrze się sprawował, rafty i supporty odrywały się bez najmniejszego problemu. Wszystkie elementy drukowałem przy temperaturze głowicy wynoszącej 206*C i temperaturze stołu wynoszącej 60*C.W międzyczasie, podczas gdy elementy drukowały się,zająłem się przygotowaniem elektroniki.Podzespoły pojazdu połączyłem wg poniższych schematów:Oraz aparaturę radiową......
Czytaj dalej...